Tutorial Part 3: Annealed Sequential-Monte-Carlo Sampler¶

Introduction¶
In this tutorial we using inference combinators to implement a Sequential Monte Carlo Sampler (Del Moral et al., 2006) that generates samples along a geometric annealing path
\begin{align} \gamma_k(x; \beta_k) := q_1(x)^{(1-\beta_k)}\gamma(x)^{\beta_k} ,&& \beta_1 = 0 ,&& \beta_k \in [0, 1] ,&& \beta_K = 1, \end{align}
as outlined in Zimmermann et al.. At each step \(k\) we are given approximate samples \(x_{k-1}\) from the last target \(\gamma_{k-1}\) and use a variational proposals \(q_k(\cdot \mid x_{k-1})\) to generate proposals \(x_k\) for the next target density \(\gamma_k\). We use these proposals to compute an importance weights
\begin{align} w_1 = 1 ,&& w_k = \frac{r_{k-1}(x_{k-1} \mid x_k)\gamma_k(x_k)}{\gamma_{k-1}(x_{k-1})q_k(x_k \mid x_{k-1})} && \text{for}\ 1 < k\leq K , \end{align}
which we can use to resample our particles in order to get approximate samples for the next target distribution \(\gamma_k\).
While this sampling strategy is always valid, the quality of the sampler crucially depends on the variance of the importance weight above. The variance of the importance weights \(w_k\) is minimized when
\begin{align} \check \gamma_k(x_{k-1}, x_k) := r_{k-1}(x_{k-1} \mid x_k)\gamma_k(x_k) && \text{and}\ && \hat \gamma_k(x_{k-1}, x_k) := \gamma_{k-1}(x_{k-1})q_k(x_k \mid x_{k-1}) \end{align}
are equal. To make \(\hat \gamma_k\) as similar as possible to \(\check\gamma_k\), we model the variational proposals \(q_k\) and reverse kernels \(r_k\) as variational distribution with parameters \(\phi\) and \(\theta\) respectively and minimize a KL-divergence
\begin{align} \mathcal{D}_{\mathrm{KL}}(\hat\gamma_{k} \mid \check \gamma_{k}) = \mathbb{E}_{\hat\gamma_{k}(x_{k-1}, x_{k}; \phi, \beta_{k-1})} \left[ \log \frac{\hat \gamma_k(x_{k-1}, x_k; \phi, \beta_{k-1})}{\check\gamma_k(x_{k-1}, x_k; \theta, \beta_{k})} \right] \end{align}
at each step. We additionally learn the parameters of the schedule of the annealing path \(\beta_k\) (for \(1<k<K\)). Note that the optimization problem in this setting is underconstrained, however, the additional degrees of freedom might be helpful to make intermediate densities, between which the variational proposals struggle to map, close together and vice versa. For a more detailed exposition we refer to Zimmermann et al..
Defining the target and proposal density¶
We first define our target density which is an unnormalized gaussian mixture with \(M=8\) modes, equally spaced around a circle with radius \(10\) around the origin. Our initial proposal is Normal with zero mean and standard deviation \(5\).
[1]:
# !pip install numpyro coix
[2]:
import matplotlib.pyplot as plt
import numpy as np
import jax.numpy as jnp
import flax
import flax.linen as nn
import numpyro.distributions as dist
import numpyro
numpyro.set_platform("cpu")
def ring_gmm_log_density(x, M):
angles = 2 * jnp.arange(1, M + 1) * jnp.pi / M
mu = 10 * jnp.stack([jnp.sin(angles), jnp.cos(angles)], -1)
sigma = jnp.sqrt(0.5)
return nn.logsumexp(
dist.Normal(mu, sigma).log_prob(x[..., None, :]).sum(-1), -1
)
def proposal_log_density(x):
return dist.Normal(0, 5).log_prob(x).sum(-1)
xrange = np.linspace(-12, 12, 100)
m_xy = np.dstack(np.meshgrid(xrange, xrange))
m_target = np.exp(ring_gmm_log_density(m_xy, M=8))
m_proposal = np.exp(proposal_log_density(m_xy))
fig, (ax1, ax2) = plt.subplots(nrows=1, ncols=2)
ax1.set_title("Proposal Density")
ax1.imshow(m_proposal)
xax1, yax1 = ax1.axes.get_xaxis(), ax1.axes.get_yaxis()
xax1.set_visible(False)
yax1.set_visible(False)
ax2.set_title("Target Density")
ax2.imshow(m_target)
xax2, yax2 = ax2.axes.get_xaxis(), ax2.axes.get_yaxis()
xax2.set_visible(False)
yax2.set_visible(False)

Defining a Sequence of annealed intermediate densities¶
Given the proposal and target densities defined above, we can define our intermediate annealed densities using flax. Note that we are defining the tunable parameters beta_raw in log space and normalize them appropriately to be in the interval \([0, 1]\).
[3]:
class AnnealedDensity(nn.Module):
M = 8
@nn.compact
def __call__(self, x, index=0):
beta_raw = self.param("beta_raw", lambda _: -jnp.ones(self.M - 2))
beta = nn.sigmoid(
beta_raw[0] + jnp.pad(jnp.cumsum(nn.softplus(beta_raw[1:])), (1, 0))
)
beta = jnp.pad(beta, (1, 1), constant_values=(0, 1))
beta_k = beta[index]
target_density = ring_gmm_log_density(x, self.M)
init_proposal = proposal_log_density(x)
return beta_k * target_density + (1 - beta_k) * init_proposal
Network¶
We now define our variational kernels, which each consist of a two-layer MLP with ReLU activations. We additionally define a helper class VariationalKernelList, which gives us convenient access to the individual variational kernels (automatically selecting the correct set of parameters), by providing the corresponding index. Lastly we define a Network class which wraps around the annealed target, forward kernels, and reverse kernels. This is convenient as it lets us pass around a single
object which gives us access to the network of our individual model components.
[4]:
class VariationalKernelNetwork(nn.Module):
@nn.compact
def __call__(self, x):
h = nn.Dense(50)(x)
h = nn.relu(h)
loc = nn.Dense(2, kernel_init=nn.initializers.zeros)(h) + x
scale_raw = nn.Dense(2, kernel_init=nn.initializers.zeros)(h)
return loc, nn.softplus(scale_raw)
class VariationalKernelNetworks(nn.Module):
M = 8
@nn.compact
def __call__(self, x, index=0):
if self.is_mutable_collection('params'):
vmap_net = nn.vmap(
VariationalKernelNetwork,
variable_axes={'params': 0},
split_rngs={'params': True},
)
out = vmap_net(name='kernel')(
jnp.broadcast_to(x, (self.M - 1,) + x.shape)
)
return jax.tree_util.tree_map(lambda x: x[index], out)
params = self.scope.get_variable('params', 'kernel')
params_i = jax.tree_util.tree_map(lambda x: x[index], params)
return VariationalKernelNetwork(name='kernel').apply(
flax.core.freeze({'params': params_i}), x
)
class Networks(nn.Module):
def setup(self):
self.forward_kernel_params = VariationalKernelNetworks()
self.reverse_kernel_params = VariationalKernelNetworks()
self.anneal_density = AnnealedDensity()
def __call__(self, x):
self.reverse_kernel_params(x)
self.anneal_density(x)
return self.forward_kernel_params(x)
Defining the model components¶
With all of our network definitions in place we can now define our model components as probabilistic programs in numpyro.
[5]:
def anneal_target(network, k=0):
x = numpyro.sample("x", dist.Normal(0, 5).expand([2]).mask(False).to_event())
# numpyro.factor("anneal_density", network.anneal_density(x, index=k))
numpyro.sample(
"anneal_density", dist.Unit(network.anneal_density(x, index=k))
)
return ({"x": x},)
def anneal_forward(network, inputs, k=0):
mu, sigma = network.forward_kernel_params(inputs["x"], index=k)
return numpyro.sample("x", dist.Normal(mu, sigma).to_event(1))
def anneal_reverse(network, inputs, k=0):
mu, sigma = network.reverse_kernel_params(inputs["x"], index=k)
return numpyro.sample("x", dist.Normal(mu, sigma).to_event(1))
Using predefined inference algorithms in coix¶
Coix already implements a selection of inference algorithms including Nested Variational Inference (NVI). All we need to do is to instantiate our model components and pass it to the method that composes the inference program for us.
[6]:
from functools import partial
import jax
from jax import random
import coix
coix.set_backend("coix.numpyro")
def make_anneal(params, unroll=False, num_particles=10, num_targets=8):
network = coix.util.BindModule(Networks(), params)
# Add particle dimension and construct a program.
make_particle_plate = lambda: numpyro.plate("particle", num_particles, dim=-1)
targets = lambda k: make_particle_plate()(
partial(anneal_target, network, k=k)
)
forwards = lambda k: make_particle_plate()(
partial(anneal_forward, network, k=k)
)
reverses = lambda k: make_particle_plate()(
partial(anneal_reverse, network, k=k)
)
if unroll: # to unroll the algorithm, we provide a list of programs
targets = [targets(k) for k in range(num_targets)]
forwards = [forwards(k) for k in range(num_targets - 1)]
reverses = [reverses(k) for k in range(num_targets - 1)]
program = coix.algo.nvi_rkl(
targets, forwards, reverses, num_targets=num_targets
)
return program
Evaluating the untrained model¶
As mentioned before, while our sampler might not be very efficient before we train it, it is still valid. So let’s see how our sampler performs pre-training first.
[7]:
from matplotlib.animation import FuncAnimation
from matplotlib.patches import Ellipse, Rectangle
def eval_program(seed, params, num_particles):
with numpyro.handlers.seed(rng_seed=seed):
p = make_anneal(params, unroll=True, num_particles=num_particles)
out, trace, metrics = coix.traced_evaluate(p)()
return out, trace, metrics
anneal_net = Networks()
init_params = anneal_net.init(random.PRNGKey(0), jnp.zeros(2))
_, trace, metrics = eval_program(
random.PRNGKey(1), init_params, num_particles=100000
)
metrics.pop("log_weight")
anneal_metrics = jax.tree_util.tree_map(
lambda x: round(float(jnp.mean(x)), 4), metrics
)
print(anneal_metrics)
fig, (ax1, ax2) = plt.subplots(nrows=1, ncols=2)
x = trace["x"]["value"].reshape((-1, 2))
H, xedges, yedges = np.histogram2d(
x[:, 0], x[:, 1], range=[[-12, 12], [-12, 12]], bins=100
)
ax1.set_title("Untrained Proposal Density")
ax1.imshow(H.T)
xax1, yax1 = ax1.axes.get_xaxis(), ax1.axes.get_yaxis()
xax1.set_visible(False)
yax1.set_visible(False)
ax2.set_title("Target Density")
ax2.imshow(m_target)
xax2, yax2 = ax2.axes.get_xaxis(), ax2.axes.get_yaxis()
xax2.set_visible(False)
yax2.set_visible(False)
{'ess': 16678.6855, 'log_Z': 2.0389, 'log_density': -3.656, 'loss': 12.3431}
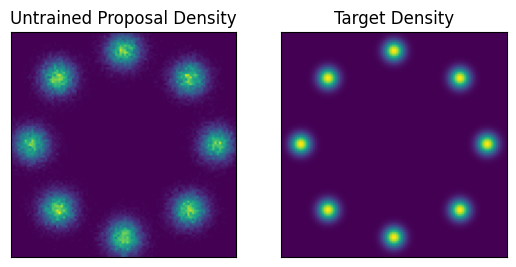
While visually the samples loosely approximate the target density we can clearly see that the modes are too wide and not tightly enough peaked. This is also reflected in the statistics that we can access in the metics dictionary returned by the evaluation effect handler. We can see that the ess is around \(300\) when taking \(1000\) samples.
Training¶
So let’s see if we can do better by training our model with NVI. All we need to do is to repeatedly run our inference program, differentiate the resulting loss, and take a gradient step. coix.util.train provides a convenient wrapper for such a training loop and optionally compiles the training procedure.
[8]:
import optax
def loss_fn(params, key, num_particles, unroll=False):
# Run the program and get metrics.
program = make_anneal(params, num_particles=num_particles, unroll=unroll)
with numpyro.handlers.seed(rng_seed=key):
_, _, metrics = coix.traced_evaluate(program)()
return metrics["loss"], metrics
optimizer = optax.adam(1e-3)
num_steps = 50000
num_particles = 36
unroll = True
trained_params, metrics = coix.util.train(
partial(loss_fn, num_particles=num_particles, unroll=unroll),
init_params,
optimizer,
num_steps,
jit_compile=True,
)
Compiling the first train step...
Time to compile a train step: 6.4172139167785645
=====
Step 2500 | ess 25.2412 | log_Z 1.2350 | log_density -3.7176 | loss 0.9471 | squared_grad_norm 8029.2070
Step 5000 | ess 31.7915 | log_Z 2.5552 | log_density -2.5793 | loss 0.6548 | squared_grad_norm 3195.3689
Step 7500 | ess 31.3730 | log_Z 1.9925 | log_density -2.5403 | loss 0.8958 | squared_grad_norm 1125.2384
Step 10000 | ess 31.2693 | log_Z 1.4725 | log_density -3.0077 | loss 0.8856 | squared_grad_norm 252.5485
Step 12500 | ess 32.1133 | log_Z 2.1890 | log_density -2.0786 | loss 1.3447 | squared_grad_norm 435.7955
Step 15000 | ess 33.2006 | log_Z 1.8315 | log_density -2.8067 | loss 0.7987 | squared_grad_norm 306.8722
Step 17500 | ess 34.6039 | log_Z 2.0502 | log_density -2.1592 | loss 1.7737 | squared_grad_norm 120.0838
Step 20000 | ess 34.3501 | log_Z 2.1727 | log_density -2.1159 | loss 1.5451 | squared_grad_norm 58.9659
Step 22500 | ess 34.5807 | log_Z 2.2028 | log_density -2.1809 | loss 1.5018 | squared_grad_norm 90.4855
Step 25000 | ess 35.5768 | log_Z 2.3687 | log_density -2.0594 | loss 1.4789 | squared_grad_norm 87.8662
Step 27500 | ess 34.8928 | log_Z 2.0132 | log_density -2.9821 | loss 0.7715 | squared_grad_norm 112.2418
Step 30000 | ess 34.8616 | log_Z 1.6396 | log_density -2.2300 | loss 1.7796 | squared_grad_norm 53.1720
Step 32500 | ess 35.5625 | log_Z 1.9240 | log_density -2.1137 | loss 0.8976 | squared_grad_norm 66.0242
Step 35000 | ess 35.5778 | log_Z 2.0557 | log_density -2.2012 | loss 2.4074 | squared_grad_norm 68.5943
Step 37500 | ess 35.5934 | log_Z 2.1605 | log_density -2.0528 | loss 1.3179 | squared_grad_norm 50.1874
Step 40000 | ess 35.2403 | log_Z 2.2516 | log_density -2.2726 | loss 1.4254 | squared_grad_norm 53.3538
Step 42500 | ess 35.2561 | log_Z 2.3036 | log_density -2.1802 | loss 1.9746 | squared_grad_norm 85.2577
Step 45000 | ess 35.8931 | log_Z 2.1175 | log_density -1.8413 | loss 1.7932 | squared_grad_norm 71.1966
Step 47500 | ess 35.5040 | log_Z 2.0723 | log_density -2.4489 | loss 1.2341 | squared_grad_norm 33.0538
Step 50000 | ess 35.1216 | log_Z 2.0225 | log_density -2.3940 | loss 1.6225 | squared_grad_norm 82.7994
While the training loss with only 36 particles is not very informative to assess convergence, we can see that the ess goes up to about \(34\) which is a good indicator that we learned a good proposal.
Evaluate trained model¶
We already implemented an evaluation wrapped, so let’s evaluate the model again but this time with the optimized parameters.
[9]:
_, trace, metrics = eval_program(
random.PRNGKey(1), trained_params, num_particles=100000
)
anneal_metrics = jax.tree_util.tree_map(
lambda x: round(float(jnp.mean(x)), 4), metrics
)
print(anneal_metrics)
fig, (ax1, ax2) = plt.subplots(nrows=1, ncols=2)
x = trace["x"]["value"].reshape((-1, 2))
m_proposal, _, _ = np.histogram2d(
x[:, 0], x[:, 1], range=[[-12, 12], [-12, 12]], bins=100
)
ax1.set_title("Trained Proposal Density")
ax1.imshow(m_proposal.T)
xax1, yax1 = ax1.axes.get_xaxis(), ax1.axes.get_yaxis()
xax1.set_visible(False)
yax1.set_visible(False)
ax2.set_title("Target Density")
ax2.imshow(m_target)
xax2, yax2 = ax2.axes.get_xaxis(), ax2.axes.get_yaxis()
xax2.set_visible(False)
yax2.set_visible(False)
{'ess': 97606.4062, 'log_Z': 2.0777, 'log_density': -2.1979, 'log_weight': 2.0639, 'loss': 1.5816}
