Note
Go to the end to download the full example code
Example: Deep Generative Mixture Model in Oryx¶
This example illustrates how to construct an inference program based on the APGS sampler [1] for DMM. The details of DMM can be found in the sections 6.3 and F.2 of the reference. We will use the Oryx backend for this example.
References
Wu, Hao, et al. Amortized population Gibbs samplers with neural sufficient statistics. ICML 2020.
Note: The metrics seem to be incorrect in this example.
import argparse
from functools import partial
import coix
import coix.oryx as coryx
import flax.linen as nn
import jax
from jax import random
import jax.numpy as jnp
import matplotlib.pyplot as plt
import numpy as np
import numpyro
import numpyro.distributions as dist
import optax
import tensorflow as tf
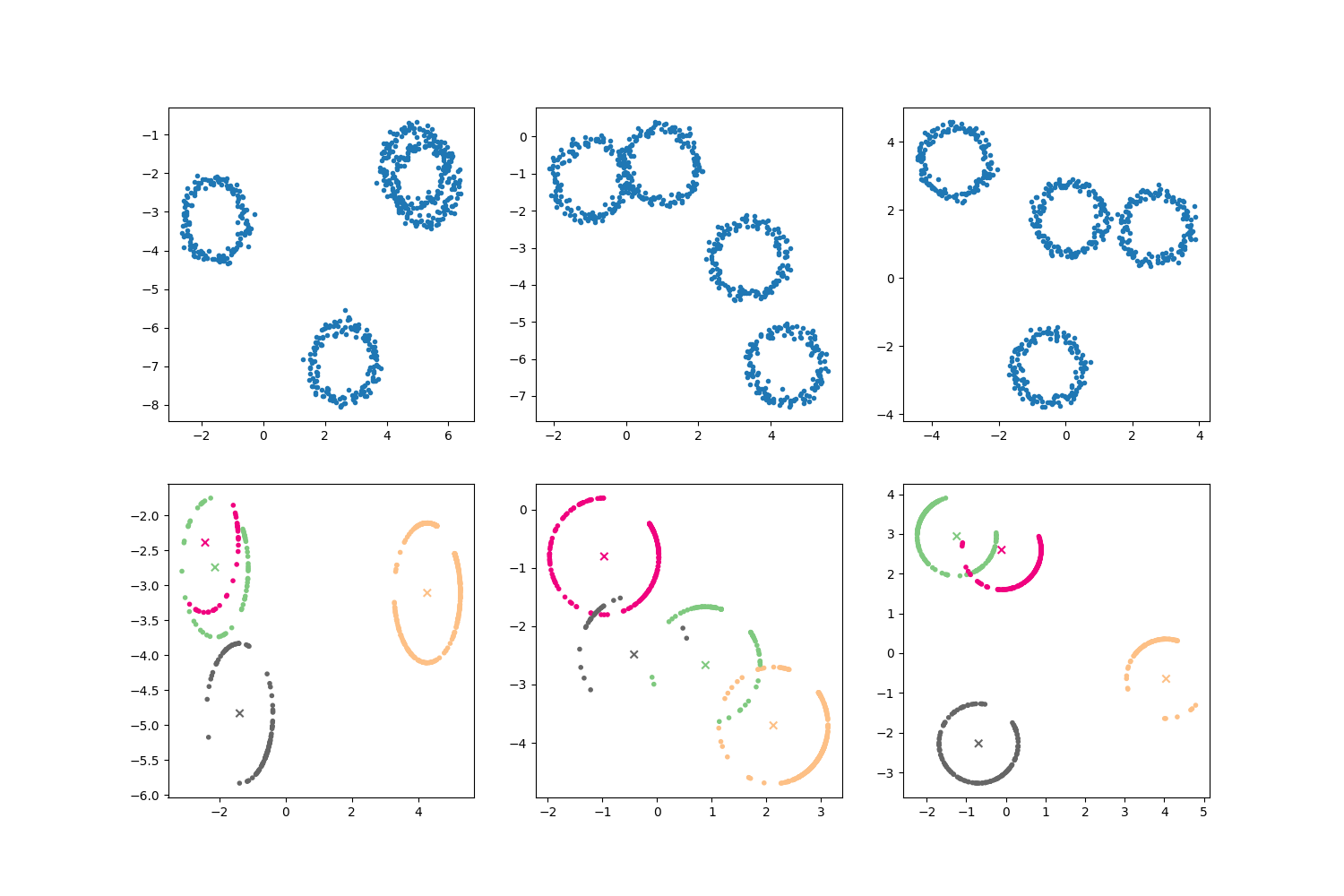
First, let’s simulate a synthetic dataset of 2D ring-shaped mixtures.
def simulate_rings(num_instances=1, N=200, seed=0):
np.random.seed(seed)
mu = np.random.normal(0, 3, (num_instances, 1, 4, 2))
angle = np.linspace(0, 2 * np.pi, N // 8, endpoint=False)
shift = np.random.uniform(
0, (2 * np.pi) // (N // 8), size=(num_instances, 1, 2, 4)
)
angle = angle[:, None, None] + shift
angle = angle.reshape((num_instances, N // 4, 4))
loc = np.stack([np.cos(angle), np.sin(angle)], -1)
noise = np.random.normal(0, 0.1, loc.shape)
x = (mu + loc + noise).reshape((num_instances, N, 2))
shuffle_idx = np.random.uniform(size=x.shape[:2] + (1,)).argsort(axis=1)
return np.take_along_axis(x, shuffle_idx, axis=1)
def load_dataset(split, *, is_training, batch_size):
if split == "train":
num_data = 20000
num_points = 200
seed = 0
else:
num_data = batch_size
num_points = 600
seed = 1
data = simulate_rings(num_data, num_points, seed=seed)
ds = tf.data.Dataset.from_tensor_slices(data)
ds = ds.repeat()
if split == "train":
ds = ds.shuffle(10 * batch_size, seed=0)
ds = ds.batch(batch_size)
return ds.as_numpy_iterator()
Next, we define the neural proposals for the Gibbs kernels and the neural decoder for the generative model.
class EncoderMu(nn.Module):
@nn.compact
def __call__(self, x):
s = nn.Dense(32)(x)
s = nn.tanh(s)
s = nn.Dense(8)(s)
t = nn.Dense(32)(x)
t = nn.tanh(t)
t = nn.Dense(4)(t)
t = nn.softmax(t, -1)
s, t = jnp.expand_dims(s, -2), jnp.expand_dims(t, -1)
st = (s * t).sum(-3) / t.sum(-3)
shape = st.shape[:-1] + (2,)
x = jnp.concatenate([st, jnp.zeros(shape), jnp.full(shape, 10.0)], -1)
x = nn.Dense(64)(x)
x = x.reshape(x.shape[:-1] + (2, 32))
x = nn.tanh(x)
loc = nn.Dense(2)(x[..., 0, :])
scale_raw = 0.5 * nn.Dense(2)(x[..., 1, :])
return loc, jnp.exp(scale_raw)
class EncoderC(nn.Module):
@nn.compact
def __call__(self, x):
x = nn.Dense(32)(x)
x = nn.relu(x) # nn.tanh(x)
logits = nn.Dense(1)(x).squeeze(-1)
return logits + jnp.log(jnp.ones(4) / 4)
class EncoderH(nn.Module):
@nn.compact
def __call__(self, x):
x = nn.Dense(64)(x)
x = x.reshape(x.shape[:-1] + (2, 32))
x = nn.tanh(x)
alpha_raw = nn.Dense(1)(x[..., 0, :]).squeeze(-1)
beta_raw = nn.Dense(1)(x[..., 1, :]).squeeze(-1)
return jnp.exp(alpha_raw), jnp.exp(beta_raw)
class DecoderH(nn.Module):
@nn.compact
def __call__(self, x):
x = nn.Dense(32)(jnp.expand_dims(x, -1))
x = nn.tanh(x)
x = nn.Dense(2)(x)
angle = x / jnp.linalg.norm(x, axis=-1, keepdims=True)
radius = 1.0 # self.param("radius", nn.initializers.ones, (1,))
return radius * angle
class DMMAutoEncoder(nn.Module):
def setup(self):
self.encode_initial_mu = EncoderMu()
self.encode_mu = EncoderMu()
self.encode_c = EncoderC()
self.encode_h = EncoderH()
self.decode_h = DecoderH()
def __call__(self, x): # N x D
# Heuristic procedure to setup initial parameters.
mu, _ = self.encode_initial_mu(x) # M x D
xmu = jnp.expand_dims(x, -2) - mu
logits = self.encode_c(xmu) # N x M
c = jnp.argmax(logits, -1) # N
loc = mu[c] # N x D
alpha, beta = self.encode_h(x - loc) # N
h = alpha / (alpha + beta) # N
xch = jnp.concatenate([x, jax.nn.one_hot(c, 4), jnp.expand_dims(h, -1)], -1)
mu, _ = self.encode_mu(xch) # M x D
angle = self.decode_h(h) # N x D
x_recon = mu[c] + angle # N x D
return x_recon
Then, we define the target and kernels as in Section 6.3.
def dmm_target(network, key, inputs):
key_out, key_mu, key_c, key_h = random.split(key, 4)
N = inputs.shape[-2]
mu = coryx.rv(dist.Normal(0, 10).expand([4, 2]), name="mu")(key_mu)
c = coryx.rv(dist.DiscreteUniform(0, 3).expand([N]), name="c")(key_c)
h = coryx.rv(dist.Beta(1, 1).expand([N]), name="h")(key_h)
x_recon = mu[c] + network.decode_h(h)
x = coryx.rv(dist.Normal(x_recon, 0.1), obs=inputs, name="x")
out = {"mu": mu, "c": c, "h": h, "x_recon": x_recon, "x": x}
return key_out, out
def dmm_kernel_mu(network, key, inputs):
if not isinstance(inputs, dict):
inputs = {"x": inputs}
key_out, key_mu = random.split(key)
if "c" in inputs:
x = inputs["x"]
c = jax.nn.one_hot(inputs["c"], 4)
h = jnp.expand_dims(inputs["h"], -1)
xch = jnp.concatenate([x, c, h], -1)
loc, scale = network.encode_mu(xch)
else:
loc, scale = network.encode_initial_mu(inputs["x"])
mu = coryx.rv(dist.Normal(loc, scale), name="mu")(key_mu)
out = {**inputs, **{"mu": mu}}
return key_out, out
def dmm_kernel_c_h(network, key, inputs):
key_out, key_c, key_h = random.split(key, 3)
x, mu = inputs["x"], inputs["mu"]
xmu = jnp.expand_dims(x, -2) - mu
logits = network.encode_c(xmu)
c = coryx.rv(dist.Categorical(logits=logits), name="c")(key_c)
alpha, beta = network.encode_h(x - mu[c])
h = coryx.rv(dist.Beta(alpha, beta), name="h")(key_h)
out = {**inputs, **{"c": c, "h": h}}
return key_out, out
Finally, we create the dmm inference program, define the loss function, run the training loop, and plot the results. Note that we are using 10x less steps than the paper.
def make_dmm(params, num_sweeps):
network = coix.util.BindModule(DMMAutoEncoder(), params)
# Add particle dimension and construct a program.
target = jax.vmap(partial(dmm_target, network))
kernels = [
jax.vmap(partial(dmm_kernel_mu, network)),
jax.vmap(partial(dmm_kernel_c_h, network)),
]
program = coix.algo.apgs(target, kernels, num_sweeps=num_sweeps)
return program
def loss_fn(params, key, batch, num_sweeps, num_particles):
# Prepare data for the program.
shuffle_rng, rng_key = random.split(key)
batch = random.permutation(shuffle_rng, batch, axis=1)
batch_rng = random.split(rng_key, batch.shape[0])
batch = jnp.repeat(batch[:, None], num_particles, axis=1)
rng_keys = jax.vmap(partial(random.split, num=num_particles))(batch_rng)
# Run the program and get metrics.
program = make_dmm(params, num_sweeps)
_, _, metrics = jax.vmap(coix.traced_evaluate(program))(rng_keys, batch)
metrics = jax.tree_util.tree_map(
partial(jnp.mean, axis=0), metrics
) # mean across batch
return metrics["loss"], metrics
def main(args):
lr = args.learning_rate
num_steps = args.num_steps
batch_size = args.batch_size
num_sweeps = args.num_sweeps
num_particles = args.num_particles
train_ds = load_dataset("train", is_training=True, batch_size=batch_size)
test_ds = load_dataset("test", is_training=False, batch_size=batch_size)
init_params = DMMAutoEncoder().init(
jax.random.PRNGKey(0), jnp.zeros((200, 2))
)
dmm_params, _ = coix.util.train(
partial(loss_fn, num_sweeps=num_sweeps, num_particles=num_particles),
init_params,
optax.adam(lr),
num_steps,
train_ds,
)
program = make_dmm(dmm_params, num_sweeps)
batch = jnp.repeat(next(test_ds)[:, None], num_particles, axis=1)
rng_keys = jax.vmap(partial(random.split, num=num_particles))(
random.split(jax.random.PRNGKey(1), batch.shape[0])
)
_, out = jax.vmap(program)(rng_keys, batch)
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
for i in range(3):
n = i
axes[0][i].scatter(out["x"][n, 0, :, 0], out["x"][n, 0, :, 1], marker=".")
axes[1][i].scatter(
out["x_recon"][n, 0, :, 0],
out["x_recon"][n, 0, :, 1],
c=out["c"][n, 0],
cmap="Accent",
marker=".",
)
axes[1][i].scatter(
out["mu"][n, 0, :, 0],
out["mu"][n, 0, :, 1],
c=range(4),
marker="x",
cmap="Accent",
)
plt.show()
if __name__ == "__main__":
parser = argparse.ArgumentParser(description="Annealing example")
parser.add_argument("--batch-size", nargs="?", default=20, type=int)
parser.add_argument("--num-sweeps", nargs="?", default=8, type=int)
parser.add_argument("--num_particles", nargs="?", default=10, type=int)
parser.add_argument("--learning-rate", nargs="?", default=1e-3, type=float)
parser.add_argument("--num-steps", nargs="?", default=30000, type=int)
parser.add_argument(
"--device", default="gpu", type=str, help='use "cpu" or "gpu".'
)
args = parser.parse_args()
tf.config.experimental.set_visible_devices([], "GPU") # Disable GPU for TF.
numpyro.set_platform(args.device)
coix.set_backend("coix.oryx")
main(args)